Skill Base
Примеры программ на Arduino
Содержание
Основные части кода
Мигание светодиодом
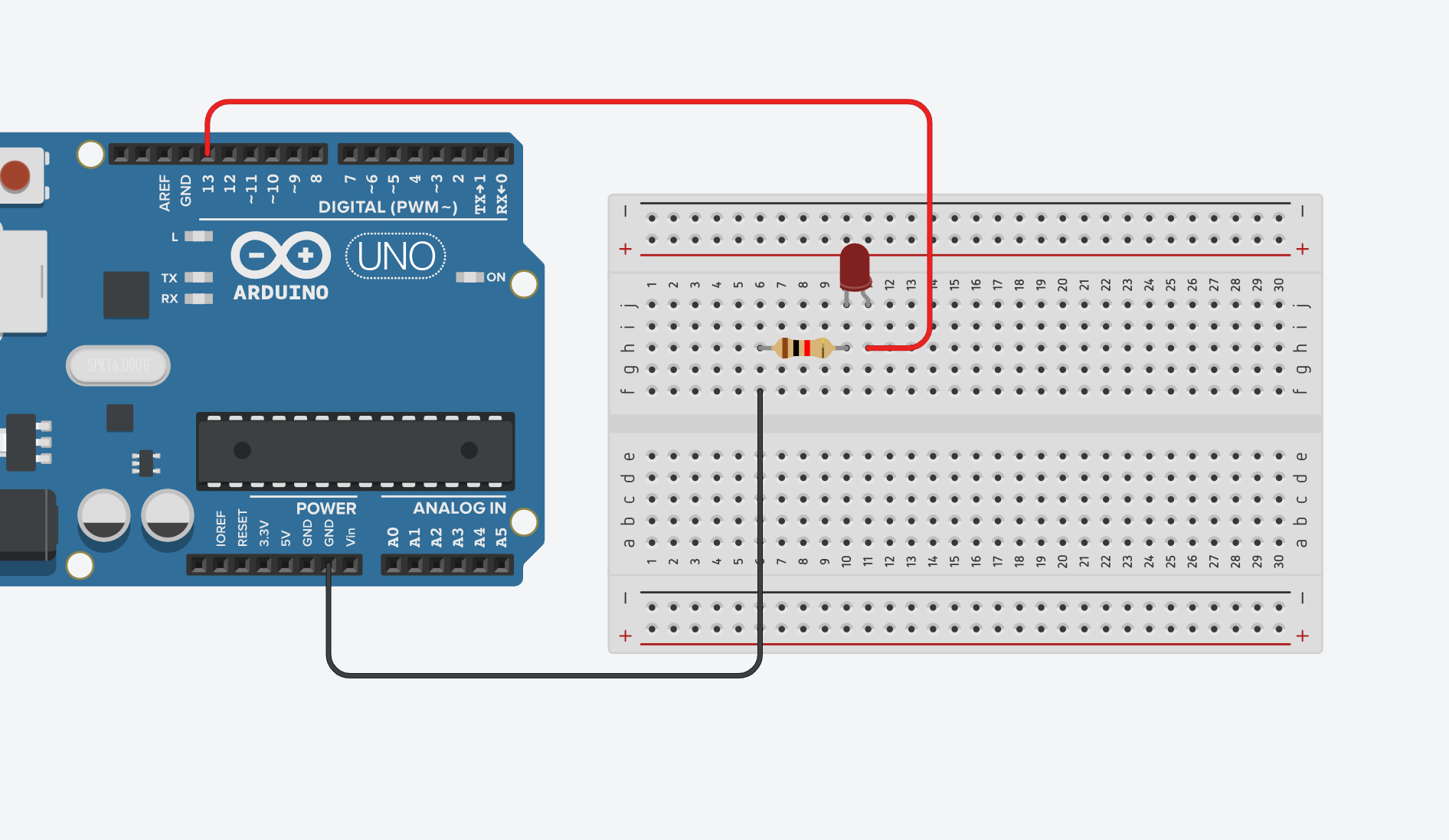
// Будем включать светодиод, подключенный к 13 пину
#define ledPin 13
void setup() {
// Устанавливаем пин в режим выхода
pinMode(ledPin, OUTPUT);
}
void loop() {
// включаем светодиод
digitalWrite(ledPin, HIGH);
// Ждем 1 секунду (1000 миллисекунд)
delay(1000);
// Выключаем светодиод
digitalWrite(ledPin, LOW);
// Ждем еще 1 секунду
delay(1000);
}
Чтение аналоговых сигналов
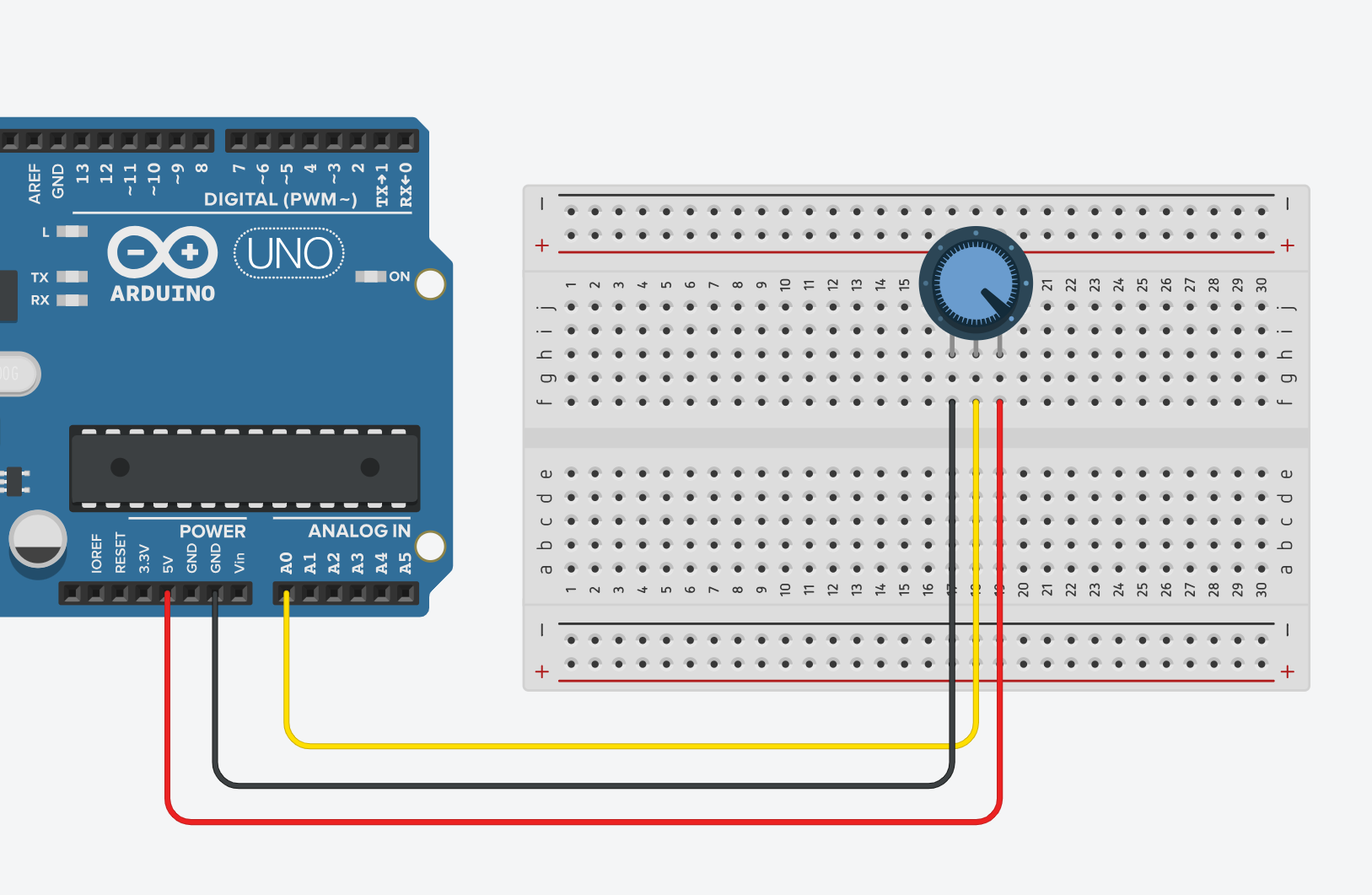
// Устанавливаем пин, к которому подключен аналоговый датчик
#define analogPin A0
void setup() {
// Включаем Serial порт на скорость 9600
Serial.begin(9600);
}
void loop() {
// Считываем значение с аналогового пина
int sensorValue = analogRead(analogPin);
// Выводим значение в Serial Monitor
Serial.print("Analog value: ");
Serial.println(sensorValue);
// Задержка
delay(500);
}
Датчик расстояния HC-SR04*
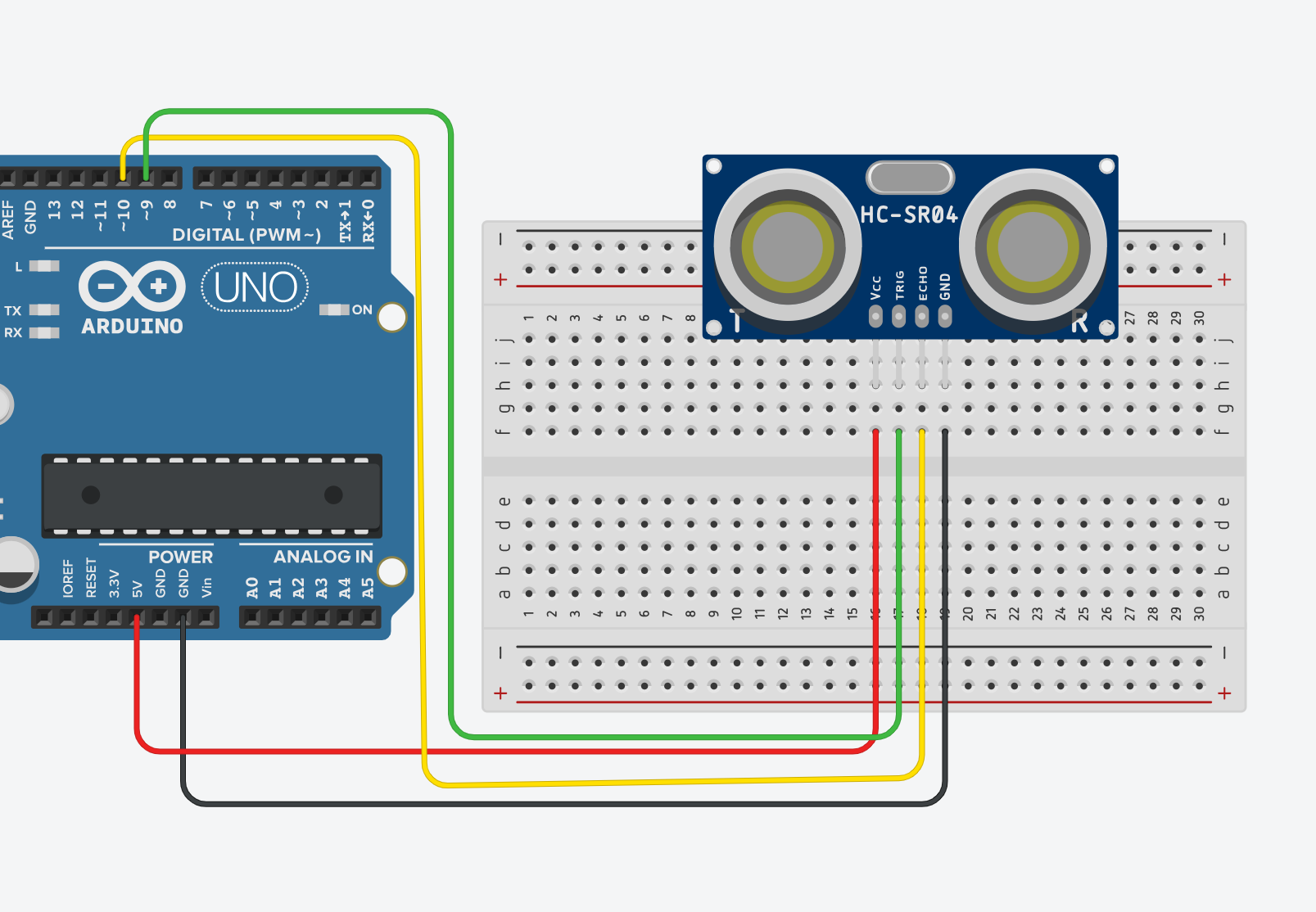
const int trigPin = 9; // Пин для TRIG
const int echoPin = 10; // Пин для ECHO
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
}
void loop() {
// Генерация ультразвукового импульса
digitalWrite(trigPin, 0);
delayMicroseconds(2);
digitalWrite(trigPin, 1);
delayMicroseconds(10);
digitalWrite(trigPin, 0);
// Измерение длительности импульса на ECHO
long duration = pulseIn(echoPin, 1);
float distance = (duration * 0.0343) / 2;
// Вывод расстояния в последовательный порт
Serial.println(distance);
delay(500); // Задержка перед следующим измерением
}
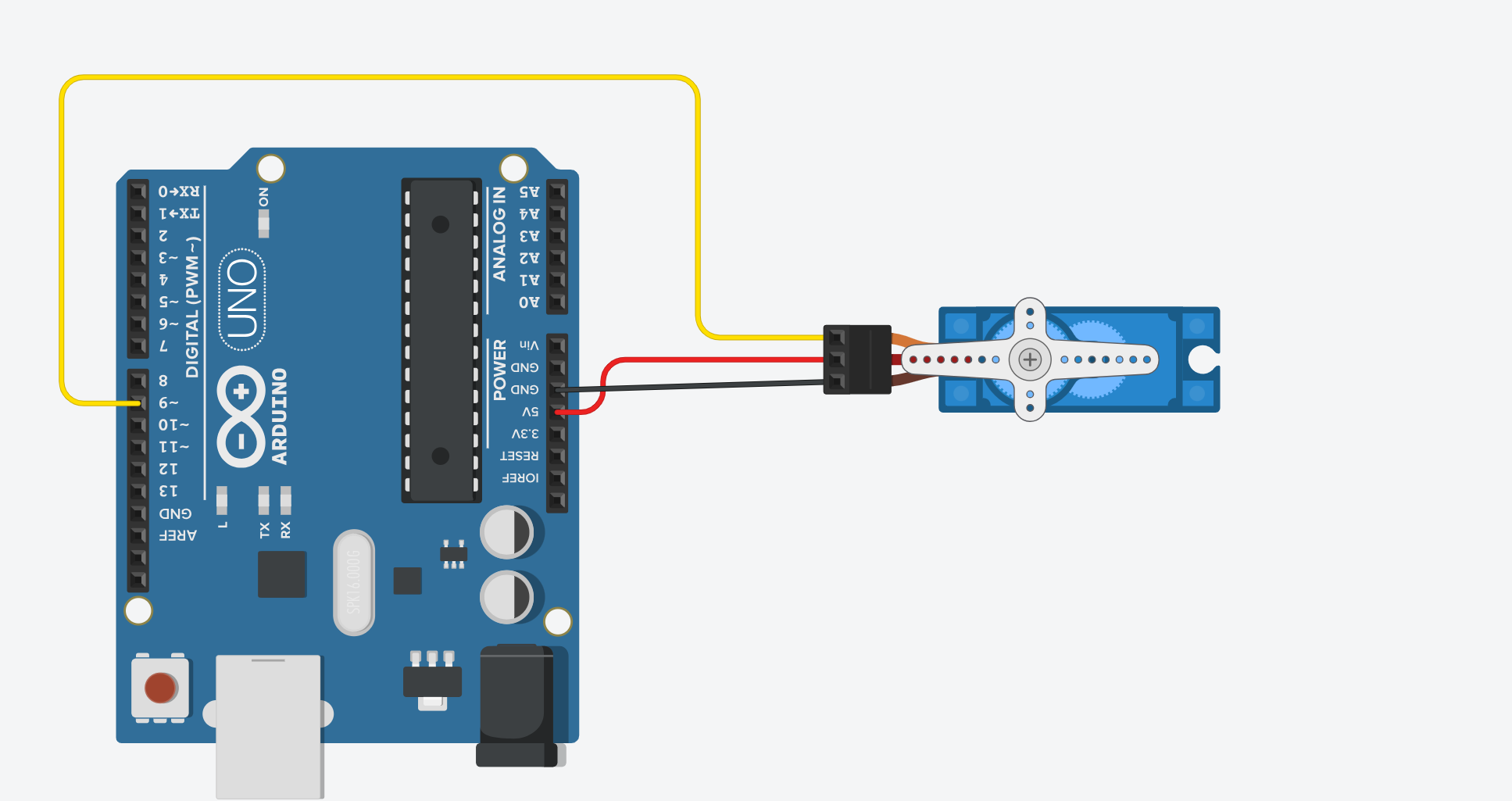
Движение сервопривода
#include <Servo.h> // Подключение библиотеки
Servo myServo; // Создание объекта для управления сервоприводом
const int servoPin = 9; // Пин подключения сервопривода
void setup() {
myServo.attach(servoPin); // Привязка сервопривода к пину
}
void loop() {
// Пример: поворот сервопривода на 0°, 90° и 180° с задержкой
myServo.write(0); // Установить угол 0°
delay(1000); // Задержка 1 секунда
myServo.write(90); // Установить угол 90°
delay(1000); // Задержка 1 секунда
myServo.write(180); // Установить угол 180°
delay(1000); // Задержка 1 секунда
}
Расширение программ
Светофор
Ночной свет
Яркость светодиода по потенцометру
Бесшумный парктроник
Электронная дверь